Сигнализатор присутствия-1


Рейтинг: 5 / 5

- Подробности
- Категория: Датчики
- Опубликовано: 02.05.2019 12:44
- Просмотров: 2797
 И. Нечаев, г.Москва
И. Нечаев, г.Москва
Самые распространённые датчики движения — это ИК-датчики, которые относятся к так называемым пассивным. Их основа — пироэлектрический датчик, который реагирует на изменение ИК-излучения, попадающего на него. Если это излучение будет мало, такой датчик на перемещение объекта не реагирует. Одним из главных недостатков большинства таких датчиков является то, что они реагируют только на движение человека. Если применить такой датчик в выключателе освещения, например, на лестничной площадке, где люди постоянно перемещаются, проблем не возникает. Но если человек будет неподвижен, такой ИК-датчик перестанет реагировать и свет погаснет. Для таких случаев более подходящим будет активный датчик, который излучает зондирующий сигнал и принимает сигнал, отражённый от объекта. Сделать такой датчик можно на основе дальномера HC-SR04.
В таком устройстве не требуется измерять точное расстояние до предмета, и вполне достаточно информации о том, что он расположен на расстоянии меньше заранее установленного. Принцип работы такого сигнализатора может быть основан на том, что в дежурном состоянии на выходе дальномера НС-SR04 присутствует сигнал, параметры которого обусловлены наличием удалённых предметов или препятствий. Впрочем, отражённого сигнала может и не быть совсем. Поэтому длительность импульса tEC на выходе Echo должна быть сравнительно большой. При появлении в зоне действия дальномера НС-SR04 более близко расположенных предметов длительность импульса tEC существенно уменьшается. Это и можно использовать для построения сигнализатора присутствия. Но для этого надо каким-то образом измерить длительность импульса tEC. В устройствах с микроконтроллерами это реализуется напрямую. Более простое решение без процедуры измерения можно реализовать на логических микросхемах.
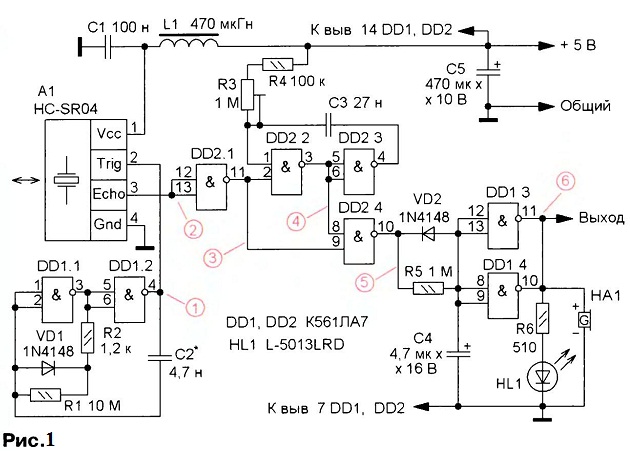
Схема датчика присутствия показана на рис. 1. На логических элементах DD1.1 и DD1.2 собран генератор запускающих импульсов. На выходе элемента DD1.2 формируются импульсы длительностью 10.....15 мкс с периодом следования около 45 мс. Реализуется это за счёт того, что резисторы в цепи зарядки и разрядки конденсатора С2 отличаются примерно на четыре порядка. Элемент DD2.1 инвертирует сигнал с выхода Echo дальномера. На элементах DD2.2 и DD2.3 собран ждущий одно-вибратор образцовых импульсов, которые задают временное окно для сравнения с инвертированным сигналом с выхода Echo. Это сравнение осуществляет логический элемент DD2.4 (2И-НЕ). На элементах DD1.3 и DD1.4 собран буферный каскад, который подаёт питающее напряжение на элементы сигнализации — светодиод HL1 и акустический излучатель НА1 со встроенным генератором.
Диаграмма, поясняющая работу сигнализатора, показана на рис. 2.
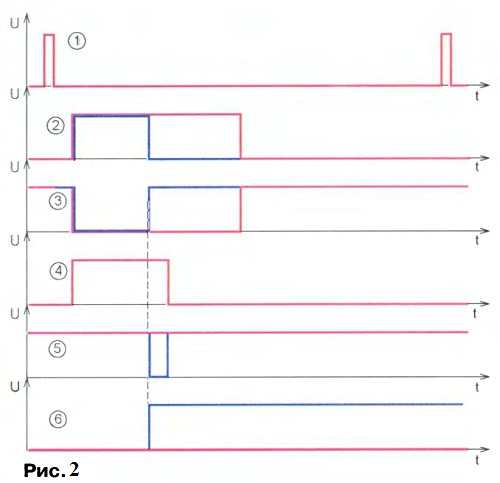
Осциллограммы в контрольных точках 1—6 в исходном состоянии показаны красным цветом. После поступления импульса запуска 1 через некоторое время на выходе Echo появляется импульс 2, длительность которого зависит от расстояния до объекта, от которого пришёл отражённый сигнал. Этот импульс инвертирует (импульс 3) элемент DD2.1. По спаду импульса 3 ждущий одновибратор формирует образцовый импульс 4, длительность которого можно изменять подстроенным резистором R3. Элемент DD2.4 сравнивает импульсы 3 и 4. В исходном (дежурном) состоянии устройства длительность импульса 3 превышает длительность импульса 4, поэтому на выходе этого элемента присутствует высокий логический уровень (сигнал 5). Конденсатор С4 через резистор R5 заряжается до того же уровня, и на выходе элементов DD1.3 и DD1.4 присутствует низкий уровень (сигнал 6), поэтому светодиод HL1 и звуковой излучатель НА1 обесточены.
При появлении в зоне контроля сигнализатора объекта, который отражает УЗ-сигналы, состояние устройства изменяется. Осциллограммы для этого случая показаны синим цветом. Во-первых, длительность импульса 2 на выходе Echo, а также импульса 3 уменьшается. Поэтому на выходе элемента DD2.4 кратковременно появится низкий уровень (им-
пульс 5), что приведёт к быстрой разрядке через диод VD2 конденсатора С4 и появлению на выходе элементов DD1.3 и DD1.4 высокого уровня. В результате включится светодиод HL1 и начнёт работать звуковой излучатель НА1, которые и подадут сигнал о наличии какого-либо объекта в зоне контроля сигнализатора. После ухода объекта из этой зоны сигнализатор вернётся в исходное состояние. В дежурном режиме устройство потребляет ток 3,3 мА, при подаче сигнала — 7,5 мА. Для его питания надо применить стабилизированный источник.
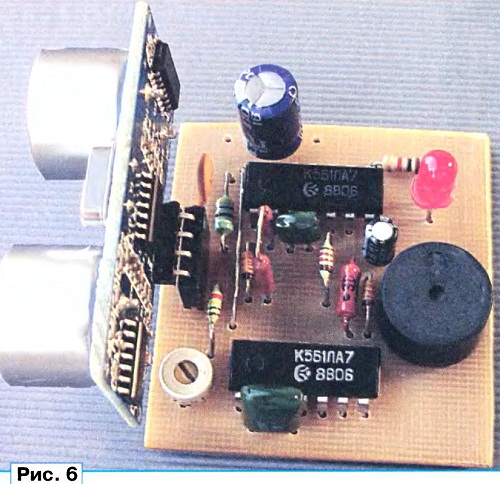
Все элементы сигнализатора размещены на односторонней печатной плате из стеклотекстолита толщиной 1...1,5 мм, её чертёж показан на рис. 3, а смонтированная плата — на рис. 4.
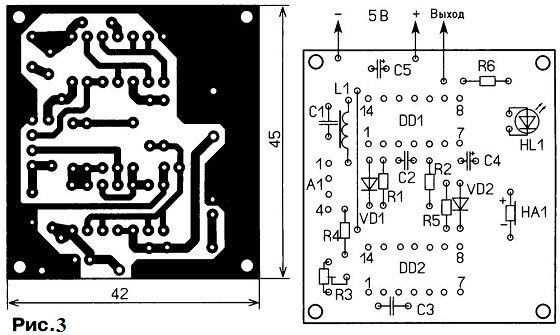
Чертеж платы в формате Sprint-Layout.
Применены постоянные резисторы С2-23, Р1-4, МЛТ (R1 в данном случае составлен из двух соединённых последовательно резисторов КВИ по 5,1 МОм), подстроечный — СПЗ-19, оксидные конденсаторы — К50-35 и импортные, остальные — плёночные или керамические (С2 должен быть с малым током утечки). Диоды — любые маломощные импульсные, светодиод — маломощный любого свечения, можно применить мигающий с напряжением питания 5 В, в этом случае резистор R6 заменяют проволочной перемычкой. Звуковой излучатель — со встроенным генератором, обеспечивающий достаточную громкость при напряжении 5 В. Дальномер HC-SR04 можно впаять в плату либо применить для его подключения гнёзда из серии PSB, например, отрезав четыре штуки от гнезда PSB-10 (051023-1x10). Второй вариант, конечно, предпочтительней, поскольку позволяет оперативно заменять дальномеры и тем самым проверять их работоспособность и сравнивать их между собой.
Налаживание сводится к проверке надёжного запуска дальномера HC-SR04, при необходимости для этого следует подобрать конденсатор С2. Дальность обнаружения устанавливают подстроечным резистором R3.
Радио №6, 2018
Ультразвуковой дальномер HC-SR04 без микроконтроллера
Сигнализатор присутствия-2
Оптический датчик-1