Ультразвуковой дальномер HC-SR04 без микроконтроллера


Рейтинг: 0 / 5

- Подробности
- Категория: статьи
- Опубликовано: 02.05.2019 11:27
- Просмотров: 2292
 И. Нечаев, г.Москва
И. Нечаев, г.Москва
В статье приводится описание принципа работы ультразвукового дальномера HC-SR04 и некоторых устройств на их основе: сигнализаторов присутствия, аналогового дальномера и выключателя освещения. Конструкции, описание которых приведены в статье, можно использовать в радиокружках для отработки навыков конструирования или в различных устройствах, в том числе и в домашней автоматике.

Ультразвуковой дальномер HC-SR04 (Ultrasonic Ranging Module HC-SR04), далее дальномер HC-SR04, широко известен, доступен и часто используется радиолюбителями для построения различных устройств. В отличие от других датчиков, дальномер HC-SR04 не реагирует на солнечный свет или цвет объекта, но его эффективность сильно зависит от отражательных свойств поверхности. Традиционно его применяют совместно с микроконтроллерами, а наиболее широко — с платами семейства Arduino, чему способствуют доступные библиотеки для управления дальномером. Описаний подобных конструкций много в Интернете. Но в некоторых случаях при построении отдельных устройств можно с успехом обойтись и без микроконтроллеров. Прежде всего, это относится к устройствам, где не требуется точного измерения расстояния, а сделать это позволяют некоторые особенности дальномера HC-SR04. Дело в том, что информация о расстоянии с его выхода формально выводится в цифровом виде, но её нетрудно простыми средствами обработать без микроконтроллера или преобразовать в аналоговую, а затем использовать для построения различных автоматов.
Но для начала надо подробнее познакомиться с конструкцией и параметрами дальномера HC-SR04 (рис. 1). Следует отметить, что топология печатной платы дальномера у разных производителей может отличаться.
Основные технические характеристики
Напряжение питания, В ......4,8...5,5
Максимальный потребляемый ток, мА...................15
Угол обзора, град.................15
Измеряемое расстояние, см .. .2...400
Погрешность измерения, см...........................0,3
Интервал рабочих температур, °С ...................0... + 60
Габаритные размеры, мм ... .45x20x15
Назначение выводов HC-SR04:
Vcc — плюсовой вывод питания;
Trig — вход запускающего сигнала;
Echo — выход эхо-сигнала;
GND — общий "земляной" вывод.
Принцип работы дальномера HC-SR04 основан на принципе эхолокации, т. е. использует точно такую же технологию, что и летучие мыши, дельфины и некоторые другие животные для ориентации в пространстве, а именно ультразвук (УЗ). На передней части платы дальномера расположено два УЗ-преобразователя, первый — это передатчик (Transmiter) УЗ-волн (ТСТ40-16Т), он расположен на плате слева, иногда его отмечают надписью "Т", а второй — приёмник (Receiver) отражённых УЗ-волн (TCT40-16R), он установлен справа, иногда маркируется надписью "R", а в центре расположен кварцевый резонатор.
Работу дальномера HC-SR04 поясняет рис. 2.
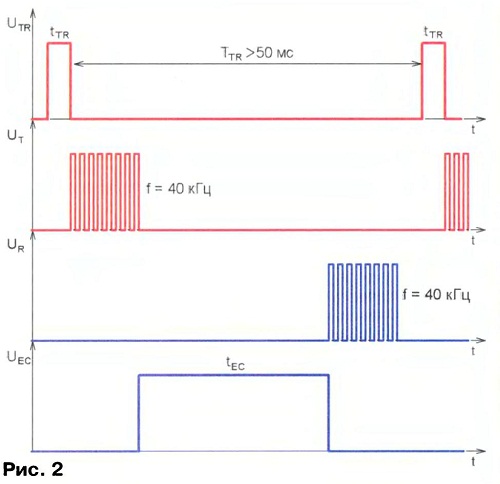
Для запуска процесса измерения на вход Trig (UTR) надо подать импульс длительностью tTR = 10...15 мкс. По спаду этого импульса дальномер излучает пачку из восьми УЗ зондирующих импульсов UT на частоте 40 кГц. Через небольшой промежуток времени (около 1 мкс) после окончании пачки УЗ-импульсов на выходе Echo (UEC) появится высокий логический уровень. Он сменится на низкий, когда в приёмник попадёт отражённый УЗ-сигнал UR. Таким образом, длительность импульса tEC на выходе Echo зависит от расстояния до препятствия: L(см) = tЕС(мкс)/58. Поэтому, измерив длительность импульса tEC и проведя несложные расчёты, можно определить это расстояние. Так обычно и происходит в устройствах, собранных на дальномере HC-SR04 и микроконтроллере (или плате семейства Arduino). По результатам измерения принимается какое-либо решение. Если отражённого УЗ-сигнала не будет или он будет ниже порога обнаружения, длительность импульса tЕС — около 38 мс. Поэтому период следования запускающих импульсов TTR должен быть не менее 45...50 мс.